O Arducopter
O Arducopter é um APM (Arduino Pilot Meta), ou seja, um cotrolador de voo de código aberto semelhante a plataforma arduíno.
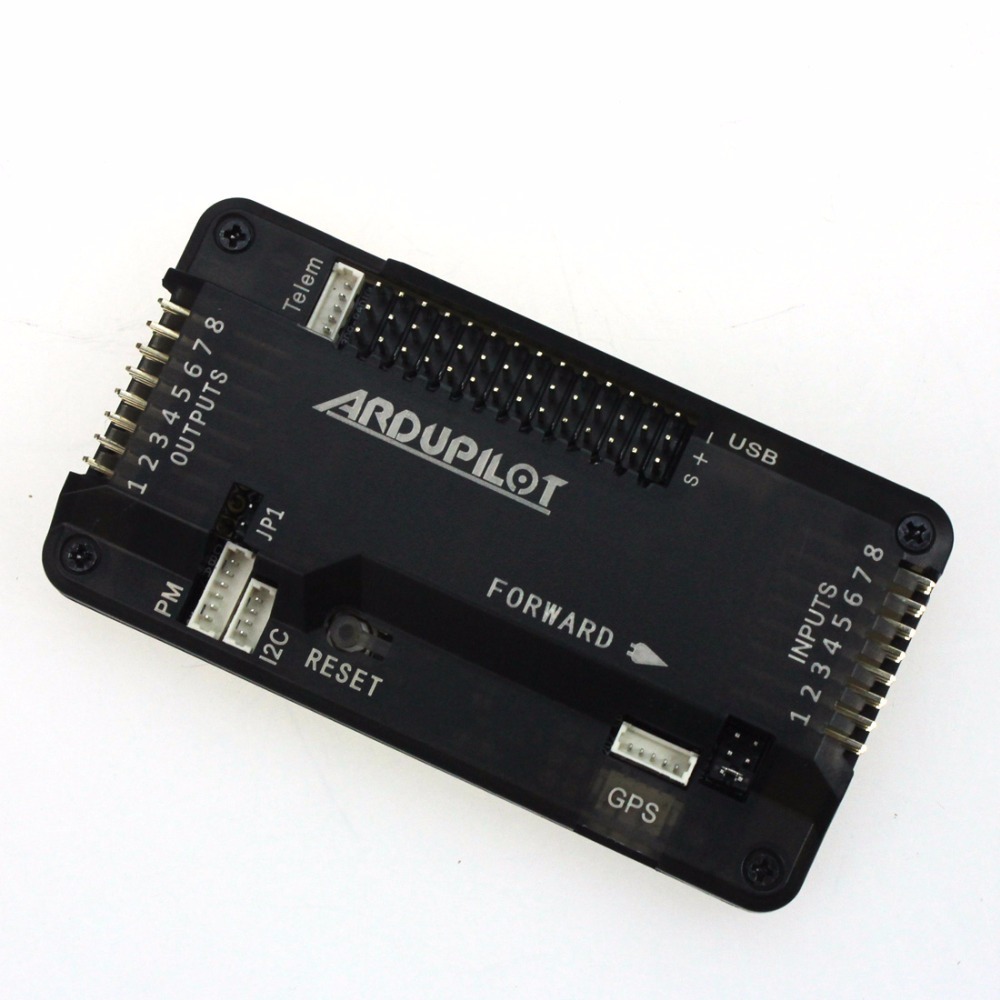
Este componente de nosso drone realiza altomáticamente a navegação, estabilização e a telemetria. E pode ser controlado pelo controle ou diretamente por uma programação de waypoints configurada anteriormente. Ele dará uma infinidade de recursos e modos de vôos, ao todo são 14 modos, dentre eles:
Stabilize - Drone fica na horizontal, estabilizado sem precisar de comandos para não cair;
Alt Hold - Sua aceleração é controlada automaticamente c/ finalidade de manter a mesma altura;
Headless Mode - O drone sempre terá a mesma frente e trás, não invertendo os comandos do rádio controle caso a traseira dele não esteja para você;
Loiter (MODO GPS) - Mantem a posição independente do vento ou qualquer outro fator;
Return to launch - Retorna sozinho para posição de decolagem;
Auto - Vôo autônomo, faz uma missão programa pelo computador;
Land - Pousa sozinho;
Failsafe - Caso seu drone perca sinal do rádio controle ou esteja acabando a bateria, ele retornará sozinho e pousará do local da decolagem.
Exemplo de controle por waypoints

Este controle pode ser feito diretamente no Software do Arducopter disponível em SOFTWARE, este programa tem de ser instalado em seu computador, qualquer dúvida vale dar uma olhada na página de configuração do aplicativo.
Flame Well

A armação foi usado um Flame Weel F450 com 4 braços proporcionando melhor resistência ao impacto e também conduz a eletricidade necessária para todos os componentes eletrônicos, minimizando o número de fios.
O design de quadro otimizado oferece muito espaço para um sistema de piloto automático.
Usando alta resistência placa de quadro PCB composto, o que torna a fiação de CES e bateria mais segura e mais fácil.