Repositório RoboticArm
Robot arm é um projeto open source desenvolvido por Florin Tobler, que consiste em um braço robótico produzido em sua íntegra em impressoras 3D.
Esse projeto é aberto a todos, tanto para a produção quanto para a modificação, apenas respeitando os termos de referência e não comercialização.
A concepção deste projeto leva em consideração a articulação de todas as partes móveis do braço sendo realizada através da atuação de motores de passo NEMA 17 - 3,5 kgf.cm / 1,2A, que fornece força e precisão aos movimentos, possibilitando segurar peças pequenas.
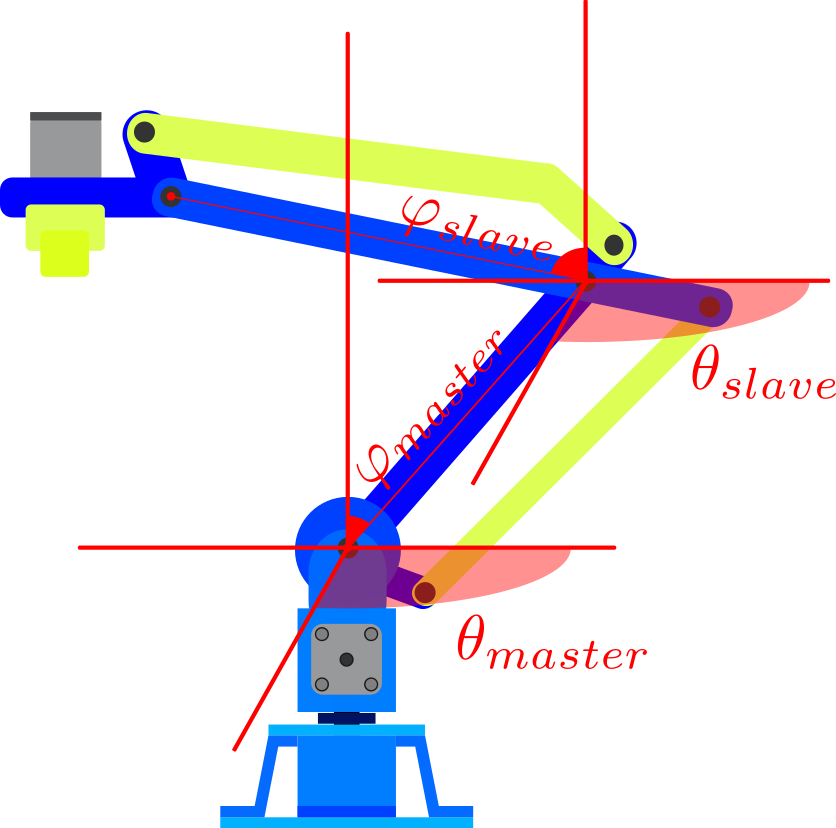
Segundo Florin Tobler, quase todas as articulações móveis possuem pelo menos um rolamento de esferas, para reduzir o atrito, além de promover a estabilidade geral e a precisão de seus movimentos. O robô é projetado para ter um baixo centro de massa. Um esquema contendo as peças utilizadas no braço robótico e suas devidas localizações é apresentada na figura abaixo.
O robô pode ser fonte alimentado com uma fonte de 24V, ao qual consome uma corrente inferior a 1A (considerando a movimentação do braço carregando peças leves).
A garra existente no braço robótico foi projetada para uma fácil substituição, sendo mantida na horizontal para simplificar a sua calibração, além de reduzir o custo e a complexidade de eixos adicionais.
Artigos Correlacionados
ROS-based remote controlled robotic arm workcell